ABSTRACT
Bluetooth is a wireless module which transfers data from dongle to blue tooth modem and modem to Bluetooth dongle. This module enables you to transmit & receive wireless data in serial format. It is an advanced technology which can is widely used now-a-days in mobile data sharing and within network communications like modem to printer, etc.. Allowing transparent two way data communication. In our project we can simply use it for transmitting wireless serial data to establish connection between MCU or embedded project and PC.
Our project is designed for surveillance applications, for which we are using a wireless camera and a Bluetooth modem for navigating the robot. Here we control the robot through PC hyper terminal or .net c# application. Bluetooth modem is connected to microcontroller serially with 9600 baud rate. The range of Bluetooth modem is 10 meters with frequency 2.4 GHz. Blue tooth Transmit power is 4dBm and sensitivity is 84 dBm. Here in our project Bluetooth modem acts as receiver and Bluetooth dongle acts as transmitter which is connected to USB port of the PC. In this way we can control the robot. However the camera interface will also be through wireless communication, for which we need to have a receiver installed in our PC. So both the camera view and the navigation of the camera can happen simultaneously from PC using Bluetooth interface. Here we use an 8051 microcontroller with 5V DC Power supply. Serial (UART) protocol is primary concern here. The heart of this project is Bluetooth modem which works on serial (UART) protocol. Micro controller is interfaced with relays which are triggered through transistor switching
BLOCK DIAGRAM
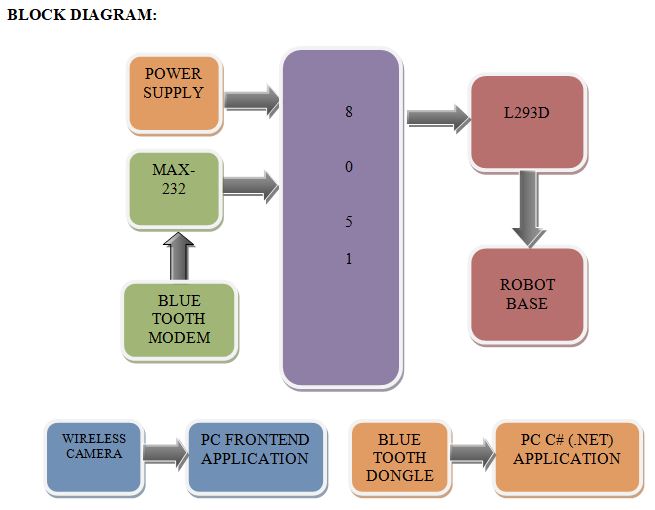
(SPY ROBOT)