Now a day’s Many real time applications connected to web(internet). This is very useful and helpful for customers to see application(requirements) from anywhere in the world. These web connected applications belong to server client model. TCP, UDP and HTTP protocols are used in this concept. Data transfer to web server is done through GPRS (General packet radio services) communication. We can transfer large amounts of data through this GPRS. Many Embedded Networking applications fall under this model only.
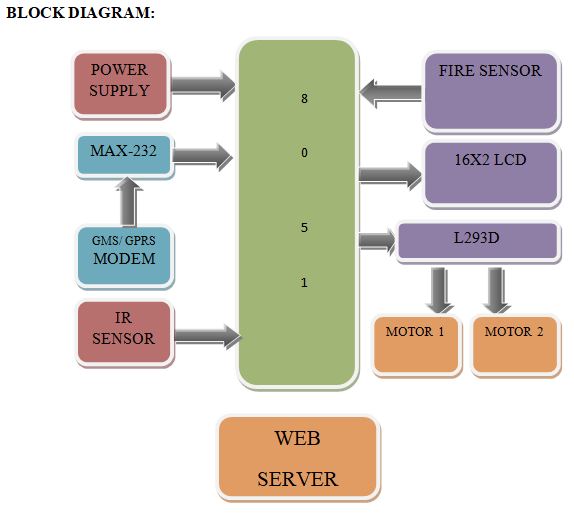
In this project ROBO consistsof GSM/GPRS modem,fire sensor,I.R. sensor. Robo moves in different directions through SMS.Robot moves in 2D directions with the help of motor driver namelyL293D.We use 60 or 100 r.p.mgeared motors for driving the body.These motors operate with 5V-20V DC.Whenever fire or smoke or both occur, microcontroller detects the occurrence and takes the information of sensors and maintain TCP/IP stack with standard format. This stack data is sent to web server using particular IP address and Port number. A 16X2 LCD display is also connected to microcontroller to see stack data status or internal debugging.
Here we use 8051 as a microcontroller with 5v DC Power supply. It is having some Basic inputs and outputs. Serial(UART) protocol is primary concern here. The main heart of this project is GSM/GPRS modem and it work on GPRS AT commands. 16X2 LCD is connected to microcontroller through Digital I/O lines.